**********************************************************
Introduction to Special Relativity
特殊相対性理論の紹介
**********************************************************
萩原良昭の著書の補足資料( Appendix_3-1-2 ) です。
**********************************************************
**********************************************
人工知能パートナー(AIPS)を支える
デジタル回路の世界
***************************************
ISBN 978-4-88359-339-2 C3055
本体 9000円+税
B5サイズ 上製 475ページ (ハードカバー)
***************************************
書籍の出版社の紹介
TEL: 042-765-6460(代) 青山社
https://www.seizansha.co.jp/ISBN/ISBN978-4-88359-339-2.html
***************************************
*************************************
Appendix 3-1-2
Field Tensor F[ ][ ] と Maxwell の方程式
本書 「デジタル回路の世界」の (pp.182~192) の補足資料です。
*************************************
特殊相対性理論
ものごとは見る立場によって違って見えます。
同じものと思っていても実は違って見える場合があります。
しかし、まわりの人は動いていても、自分の立場から見ると、
自分自身はいつも自分の世界の中心にいて静止しています。
*************************************
******************************
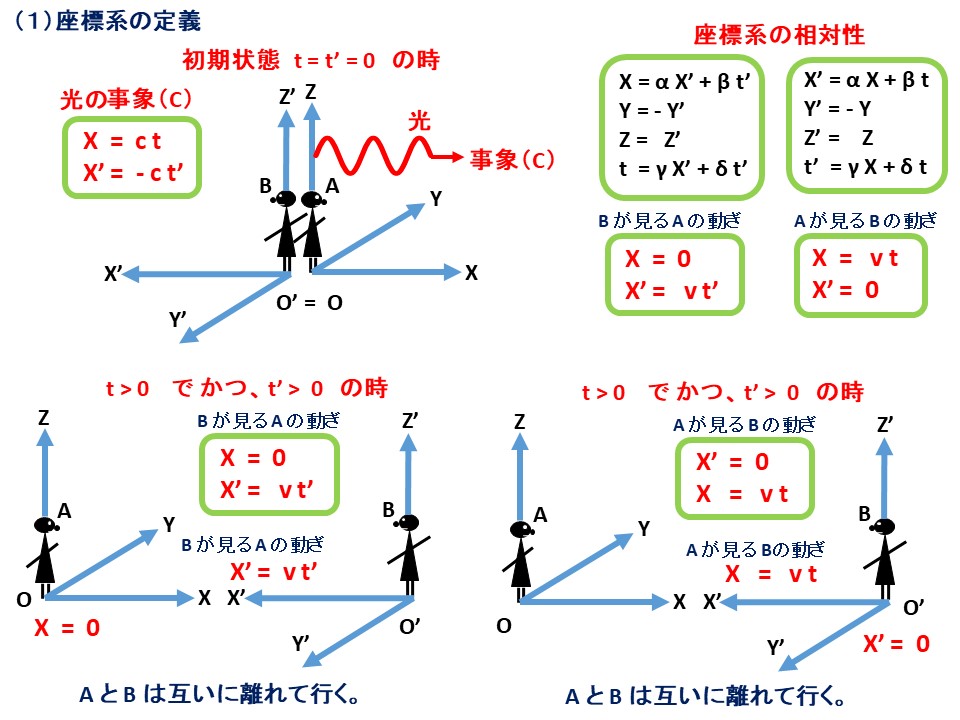
(1)座標系の定義
******************************
宇宙の中心はどこにあるのでしょうか?
あなたの見る宇宙の中心はあなた自身です。
あなたは宇宙の中心にいます。
自分自身の固有の時空間の中心で生きています。
世界中の人、一人ひとりが
このすばらしい宇宙の中心にいます。
自分自身の固有の時空間の中心で生きています。
まず、座標系の定義から始めます。
******************************
(A) 観察者Aの座標系
まず、観察者Aの座標系の定義です。
観察者Aの座標系の原点を0とします。
観察者Aの座標系のX軸を観測者Aの前方に取ります。
観察者Aの座標系のY軸を左手方向に取ります。
観察者Aの座標系のZ軸を頭上方向に取ります。
さらに観察者 A の固有時間 t を含ませると A の座標系は A( x, y, z , t ) となります。
******************************
(B) 観察者Bの座標系
観察者Bの座標系の原点をO’とします。
観察者BのX’軸を観測者Bの前方方向に取ります。
ここで観察者AのX軸座標とBのX’軸座標の間で
次の線形関係式が成り立つとします。
X’ = α X + β t ... (1) とします。
観察者BのY’軸を観測者Bの左手方向に取ります。
Y’ = - Y ... (2) となります。
観察者BのZ’軸を観測者Bの頭上方向に取ります。
Z’ = Z ... (3) となります。
************************
観察者 A の座標系の定義
X 軸(観察者 A の前方)
Y 軸(観察者 A の左手)
Z 軸(観察者 A の頭上)
************************
観察者 B の座標系の定義
X’ 軸(観察者 B の前方)
Y’ 軸(観察者 B の左手)
Z’ 軸(観察者 B の頭上)
************************
さらに観察者 B の固有時間 t’ を含ませると
Bの座標系はB( x’ , y’, z’ , t’ ) となります。
ここで、時計の進む速さは観察者によって違うとします。
観察者AとBの固有時刻 t と t’ の間で
次の線形関係式が成り立つとします。
t’ = γ X + δ t ... (4)
************************
X’ = α X + β t ... (1)
Y’ = - Y ... (2)
Z’ = Z ... (3)
t’ = γ X + δ t ... (4)
************************
次に2つの座標系の同等性について考察を続けます。
Aにとっての、自分の固有時間 t を含んだA( x , y, z , t ) 座標系の形と、
Bにとっての、自分の固有時間 t’ を含んだB( x’ , y’, z’ , t’ ) 座標系の形は、
まったく同じ形をしているとします。
これを 「2つの座標系は同等である」 と言います。
2つの座標系は、同等・同一で対称的です。
2つの座標系の変換式は、同じ物理定数で、
同じ形式で、記述することができるはずです。
これを座標系の相対性といいます。
************************
Aの座標系( t, X, Y, Z) から見たBの座標系( t', X', Y', Z')
************************
X’ = α X + β t ... (1)
Y’ = - Y ... (2)
Z’ = Z ... (3)
t’ = γ X + δ t ... (4)
************************
************************
Bの座標系( t', X', Y', Z') から見たAの座標系( t, X, Y, Z)
************************
X = α X' + β t' ... (5)
Y = - Y' ... (6)
Z = Z' ... (7)
t = γ X' + δ t' ... (8)
************************
******************************
(2)光の速度 C は不変(普遍)~約3億m/sec~約30万Km/sec
C = 299792458 m/sec
******************************
******************************
座標系の相対性と光の速度の不変(普遍)性から、
後は高校数学でLorentz 変換式を導くことができます。
******************************
最終的に、次の Lorentz 変換式を求めます。
最終的に次の様な形に式を変形していきます。
******************************
Lorentz 変換式
******************************
X’ = α ( X - v t ) ... (9)
Y' = - Y ... (10)
Z' = Z ... (11)
t’ = α ( v X /(c*c) - t ) ... (12)
******************************
X = α ( X' - v t' ) ... (13)
Y = - Y' ... (14)
Z = Z' ... (15)
t = α ( v X' / (c*c) - t' ) ... (16)
******************************
条件③: α = - 1 / sqrt ( 1 - ( v /c ) * ( v /c ) ) ... (17)
******************************
******************************
Step(1) 座標系の対称性からの条件抽出
******************************
(1) 式 X =α X’ + β t と (4) 式 t = γ X’ + δ t’ を
(5) 式 X’ = α X + β t に代入します。
X’ = α X + β t = α ( α X’ + β t’ ) + β ( γ X’ + δ t’)
= ( α*α + β γ ) X’ + ( α β + β δ ) t’
変換式の対称性から次の関係式を得ます。
( α*α + β γ ) = 1 ; ( α β + β δ ) = 0 ;
(1) 式 X =α X’ + β t と (4) 式 t = γ X’ + δ t’ を
(8) 式 t’ = γ X + δ t に代入します。
t’ = γ X + δ t = γ ( α X’ + β t’ ) + δ ( γ X’ + δ t’ )
= ( γ α + δ γ ) X’ + ( γ β + δ*δ ) t’
変換式の対称性から次の関係式を得ます。
( γ α + δ γ ) = 0 ; ( γ β + δ*δ ) = 1 ;
******************************
( α*α + β γ ) = 1 ; ( α β + β δ ) = 0 ;
( γ α + δ γ ) = 0 ; ( γ β + δ*δ ) = 1 ;
******************************
まず、 ( γ α + δ γ ) = α ( γ + δ ) = 0 より
δ = - α となります。
( α*α + β γ ) = 1 の関係式と合わせて次の条件①を得ます。
******************************
条件① : δ = - α ; γ = ( 1 - α*α ) / β ;
******************************
******************************
Step(2) 初期状態 t = t’ = 0 の時 の考察
******************************
初期時刻 ( t = t’ = 0 ) には A と B の原点 O と O’ は 同じ位置 にあるとします。
すなわち、時刻が t = t’ = 0 の時、位置が X = X’ = 0 とします。
その後、お互いから遠ざかる場合を考えます。
事象(A)の定義(観察者BがAの動きを観察する場合)
事象(A)の定義とは、単純にA の場所と時間におきる出来事や現象のことです。
観察者B から見て、A は、B のX’軸正の方向に速度 V で遠ざかるとします。
A の原点 O の座標値 X=0 は、B の座標系では X’ = v t’ に対応します。
Aの事象( X=0; t=t ) をBが見ると、 X = 0 ; X’ = v t’ となります。
X = α X’ + β t’ ; t = γ X’ + δ t’ ;
から、 0 = α v t’ + β t’ を得ます。
したがって、
******************************
条件②: β = - α v ; を得ます。
******************************
******************************
Step(3) 光の速度が一定であるという考察
******************************
次に、原点から出た光の事象 (event)=(その位置と時刻)
光は観察者AのX軸の正の方向に進むとする。
観察者 A から見た 光 の位置を X = c t としますと、
観察者 B から見た 光 の位置は X’ = - c t’ となります。
光の速度は一定であり、かつ観察者 Aと観察者 Bは背中合わせである、
観察者AのX軸の正の方向に進む光は、観察者BのX軸の負の方向に進みます。
X’ = α X + β t =- c t’ = α c t + β t ;
t’ = γ X + δ t = t’ = γ c t + δ t ;
よって次式を得る。
t’ / t = γ c + δ = - α - β / c ;
c ( 1 - α*α) /( - α v ) - α = - α + α v / c ;
- c ( 1 - α*α ) / α v = α v / c ;
( 1 - α*α ) = - ( α v / c ) * ( α v / c ) ;
1 = α*α ( 1 - ( v /c ) * ( v /c ) )
よって次式を得る。
******************************
条件③: α = - 1 / sqrt ( 1 - ( v /c ) * ( v /c ) ) ... (17)
******************************
条件 ①+②+③ より、
γ = ( 1 - α*α) / β = ( α*α- 1 ) / α v = α ( α - 1 ) / α v = α v / c ;
******************************
条件④ : γ = α v / (c*c) ;
******************************
条件 ①+②+④ より、
X’ = α ( X - v t ) ;
t’ = α ( v X / (c*c) - t ) ;
X = α ( X’ - v t’ ) :
t = α ( v X’ / (c*c) - t’ ) ;
これで最終的に Lorentz 変換式が求まりました。
******************************
******************************
(3)時間の進む速さ
******************************
座標系Aも座標系Bも動いている相手の時間がゆっくり進む様に見える!
******************************
******************************
座標系Aから見て、 動いて見える物体Bの時間(t’)はゆっくり進みます。
******************************
事象B ( X=vt ; t=t ; ) --> Δt’/Δt = - 1/α = sqrt( 1 - ( v /c ) * ( v /c
) ) < 1 ;
事象Bということは観察者はAの場合である。
車を運転する運転手(B)からは、自分の固有時間の速さは不変だが、
地上にいる人(A)の固有時間(t)に対して、Aが見る車(B)の時計(t’) は
ゆっくり進んでいるように見える。
A から見てBが動いて見えます。
A の固有時刻 t に対して、 Bの時刻 t’ は A から見て
t’ / t = - 1/ α = sqrt( 1 - ( v /c ) * ( v /c ) ) < 1 となり、
B の時刻 t’ はゆっくり進んでいる ように観察者Aからは見えます。
******************************
******************************
座標系Bから見て、 動いて見える物体Aの時間(t)はゆっくり進みます。
******************************
事象A ( X'=vt' ; t'=t'; ) --> Δt/Δt' = - 1/α = sqrt( 1 - ( v /c ) * (
v /c ) ) < 1 ;
事象Aということは観察者はBの場合である。
車を運転する運転手(A)からは、自分の固有時間の速さは不変だが、
地上にいる人(B)の固有時間(t')に対して、Bが見る車(A)の時計(t) は
ゆっくり進んでいるように見える。
B から見てAが動いて見えます。
B の固有時刻 t ' に対して、 Aの時刻 t は B から見て
t / t ' = - 1/ α = sqrt( 1 -( v /c ) * ( v /c ) ) < 1 ; となり、
A の時刻 t はゆっくり進んでいる ように観察者Bからは見えます。
******************************
******************************
事象(C)の定義
******************************
事象(C)とは、単純に飛んでゆく光の先端の、
場所と時間におきる出来事や現象の事とします。
原点から出た光の事象 (event)=(その位置と時刻) :
たとえば、次の場合を考えます:
観察者 A から見た 光 の位置 X = c t
観察者 B から見た 光 の位置 X’ = - c t’
******************************
まず、 次の関係から、
X’ = α ( X - v t ) :
t’ = α ( v X / (c*c) - t ) ;
次式を得ます:
- c t’ = α ( c t - v t ) ;
t’ = α ( v t / c - t ) ;
事象(C) に関して次の関係を得ます。
t'/t = - X'/X = sqrt ( ( c - v ) / ( c + v ) ) < 1 ;
観察者Aから見て、この光は ( t , X = ct ) に見えるが、
観察者Bから見ると、この光は ( t' , X' = - ct' ) に見えることになる。
観察者Aから見て光が前方に通り過ごして離れていく距離の値Xに対して
観察者Bから見て光が後方に通り過ごして離れていく距離の値X'は短く見える。
*********************************
******************************
事象(D)の定義
******************************
観察者(A)の座標系で、観察者(D)は X = d で静止しているとする。
今、観察者(A)の座標系で、 t=0 の時、光が原点からX軸正の方向に
出てとする。 X = d = ct ; t = d/c で 光は 観察者(D)に到達する。
この時、Bの観察者は、
X’ = α ( X - v t ) = α ( d - v d/c ) ;
t’ = α ( v X / (c*c) - t ) = α ( v t / c - t ) ;
となり、
X’ = α ( 1 - v /c ) d ;
t’ = α ( v / c - 1 ) t ;
より、 同様に、
t'/t = - X'/X = sqrt ( ( c - v ) / ( c + v ) ) < 1 ;
を得る。
******************************
******************************
事象(E)の定義
******************************
観察者(B)の座標系で、観察者(E)は X' = d' で静止しているとする。
今、観察者(B)の座標系で、 t'=0 の時、光が原点からX'軸正の方向に
出てとする。 X' = d' = ct' ; t' = d'/c で 光は 観察者(E)に到達する。
この時、Aの観察者は、
X = α ( X' - v t' ) = α ( d' - v d'/c ) ;
t = α ( v X' / (c*c) - t' ) = α ( v t '/ c - t' ) ;
となり、
X = α ( 1 - v /c ) d' ;
t = α ( v / c - 1 ) t' ;
より、 同様に、
t/t' = - X/X' = sqrt ( ( c - v ) / ( c + v ) ) < 1 ;
を得る。
******************************
******************************
事象(H)の定義
******************************
観測者 A から見て、 観測者 B は速度 v で動いているとする。
観測者 B から見て、 観測者 A は速度 v で動いているとする。
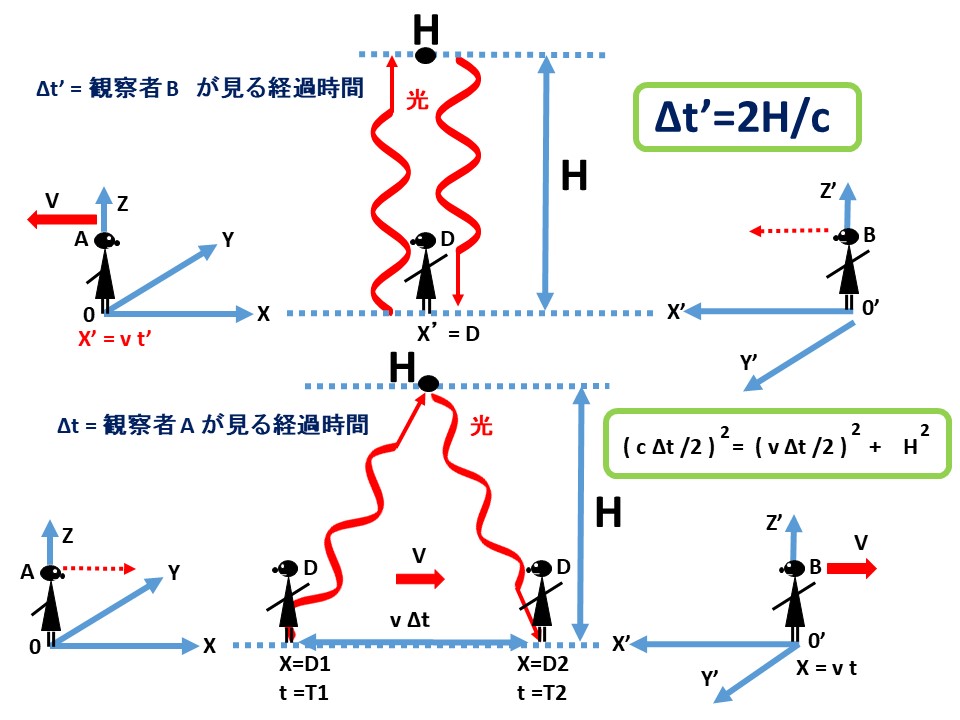
今、観察者 B の座標系において X’ = D’に静止している D から
頭上 ( Z’ 軸方向) に向かって、光が高さ H まで飛び、さらに。
反射して D’ に戻ってきたとする。
Δt’ = 観察者 Bが見る経過時間とすると、
光が戻ってくるまでの時間は Δt’= 2H/c となる。
この事象(H)を観察者 A の座標系で見る.
観察者(D') は速度 v で 観察者(A) から遠ざかっている。
観察者(D') はこの時間 Δt = ( T2 - T1 ) の間に
ΔX = v Δt だけ移動したことになる。
A が観察する光の飛行した距離は、
X=D1 から 点 ( X=D1+(D2-D1)/2 , Y = H ) で反射し、
X=D2 に戻った距離となる。
その距離は、ΔX = c Δt となる。
従って ( c Δt /2 ) * ( c Δt /2 ) = ( v Δt /2 ) * ( v Δt /2 ) + H*H となる。
従って Δt = ( 2H/c ) / sqrt ( 1 - ( v/c ) * ( v/c ) ) となる。
事象(H)の場合も事象(B)と同様に、
A の固有時刻 t に対して、 Bの時刻 t’ は A から見て
t’ / t = - 1/ α = sqrt( 1 - ( v / c ) * ( v / c ) ) < 1 ; となり、
B の時刻 t’ はゆっくり進んでいる ように観察者Aからは見えます。
******************************
******************************
(3)時間の進む速さ
まとめ
******************************
(1) 観察者(A)から動く観察者(B)を見た場合、
t’ / t = - 1/ α = sqrt( 1 - ( v / c ) * ( v / c ) ) < 1 ; となる。
(2) 観察者(B)から動く観察者(A)を見た場合、
t / t' = - 1/ α = sqrt( 1 - ( v / c ) * ( v / c ) ) < 1 ; となる。
(3) 観察者(A)の前方(X軸正の方向)に光が進むとき、
t'/t = - X'/X = sqrt ( ( c - v ) / ( c + v ) ) < 1 ; となる。
(4) 観察者(B)の前方(X'軸正の方向)に光が進むとき、
t/t' = - X/X' = sqrt ( ( c - v ) / ( c + v ) ) < 1 ; となる。
******************************
******************************
(4)物体の長さ
動いている物体(B)の長さは縮んで見えます。
******************************
観察者A から見て観測者 B が速度 v で動いているとする。
ΔL = ( 座標系Aで観察する、動いている車(B)の長さ)
ΔL' = ( 座標系 Bで静止している車の固有長を観察者Bが測定した値)
車の先端の座標 ( t' = t' , X' = 0 ; t = t , X = - vt ; )
車の後端の座標 ( t' = t ', X' = - ΔL' ; t = t , X = - vt +ΔL ; )
******************************
車を運転する運転手(B)からは車の固有の長さ(ΔL' )は変化しないが、
地上にいる人(A)からは車が進行方向に縮んで ( ΔL ) に 見えます。
ΔL /ΔL' = sqrt ( 1 - ( v / c ) * ( v / c ) ) < 1
******************************
以下 工事中で~す。
**********************************************
人工知能パートナー(AIPS)を支える
デジタル回路の世界
***************************************
ISBN 978-4-88359-339-2 C3055
本体 9000円+税
B5サイズ 上製 475ページ (ハードカバー)
***************************************
書籍の出版社の紹介
TEL: 042-765-6460(代) 青山社
https://www.seizansha.co.jp/ISBN/ISBN978-4-88359-339-2.html
***************************************
return to http://www.aiplab.com